About This Project
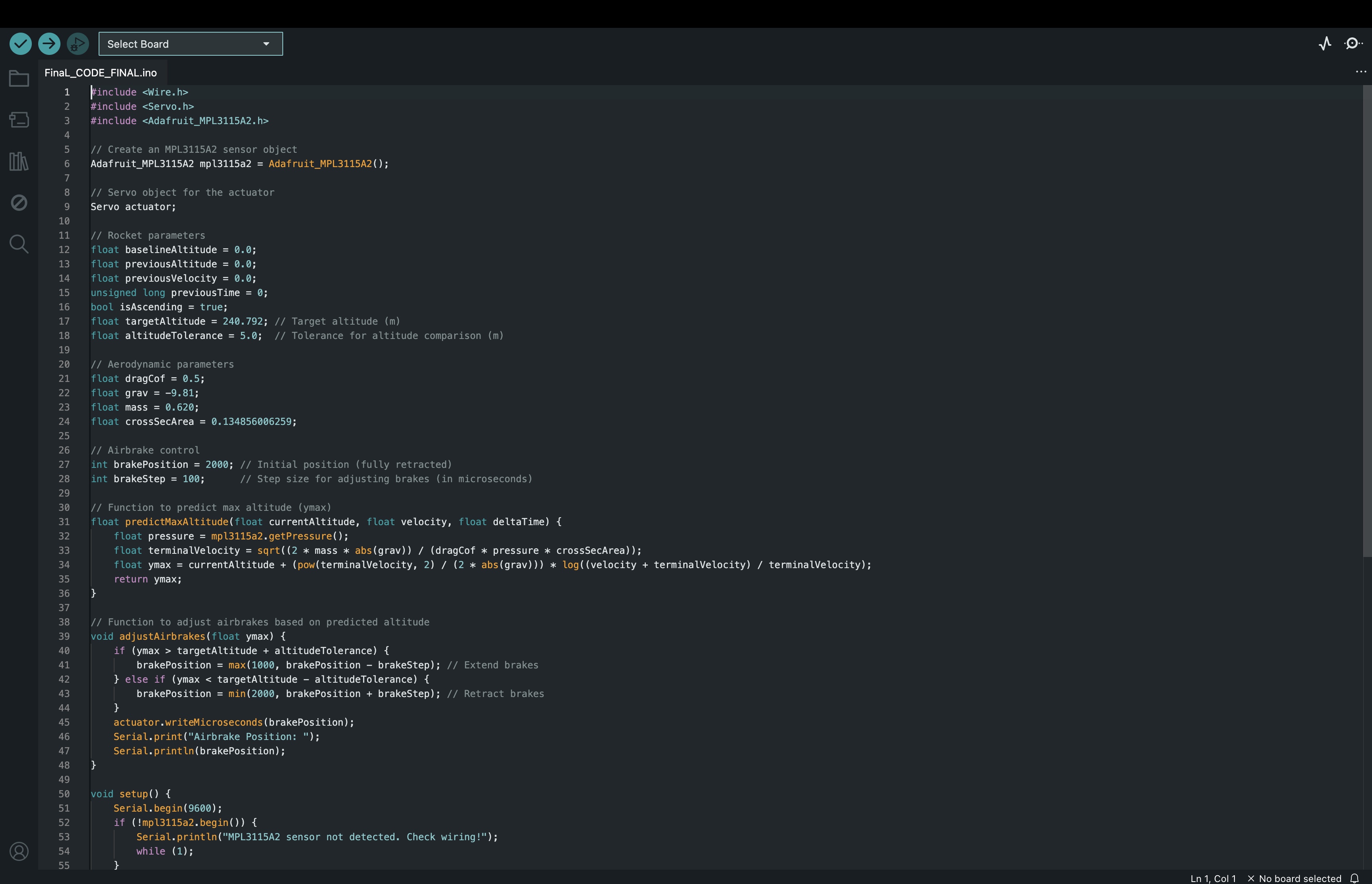
This project was part of my school rocketry club, where our goal was to design a rocket capable of reaching a precise target altitude. My role focused on building a dynamic air brake system that could actively adjust its extension based on real-time altitude data. I developed an Arduino‑controlled mechanism using an MPL3115A2 barometer and servo‑driven air brakes that responded during flight to improve accuracy and stability.
Screenshots & Diagrams